背景
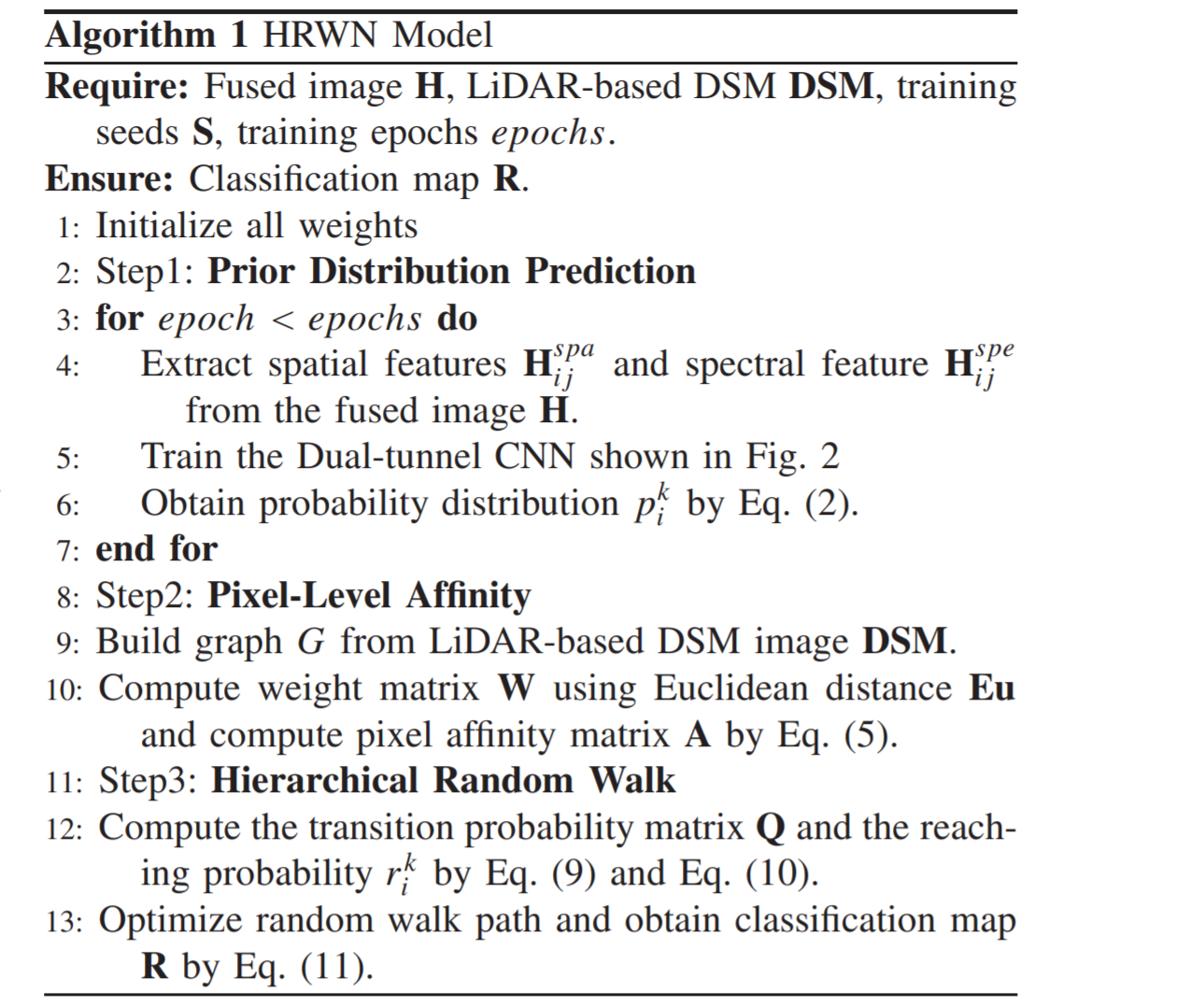
本文提出了一个分级随机游走网络(HRWN)。分级随机游走网络中:
1、首先应用双通道的卷积神经网络提取空谱信息;然后提出了一个逐像素邻近分支,用来从LiDAR数据中捕获具有不同海拔高度的类分布,以确认不同类的空间对比度。
2、然后在分层随机游走层,双通道CNN的预测分布充当全局先验,而逐像素领域affinity反映了像素对的局部相似性,这在网络的更深层中实现了空间一致性。
3、通过计算相似分布得到一个分类图。
Contributions:
1、分层随机游走网络层利用空间约束和局部种子引导进入CNN的更深层。随机行走网络层减轻了边界周围的局部弱化问题和分类图的空间碎片化问题。
2、考虑到HSI的光谱信息和LIDAR的高度信息,本文所提的双通道CNN可以利用互补特征,从空谱特征的融合数据的上分析联合特征。
3、对于基于LiDAR的DSM空间一致性问题和对比度问题,本文定义了一个新的像素affinity矩阵,该矩阵能够捕获海拔相似度并确认不同类之间的空间对比度。
模型框架
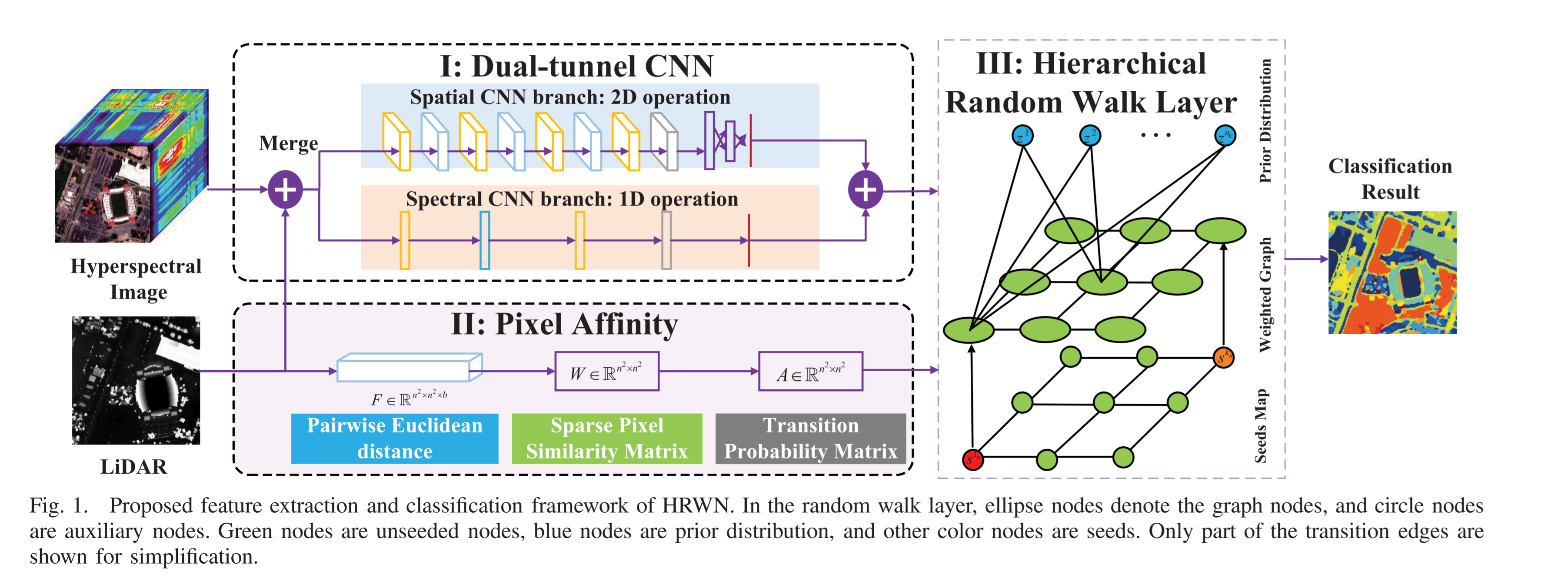
HRWN组成:
双通道的CNN模型
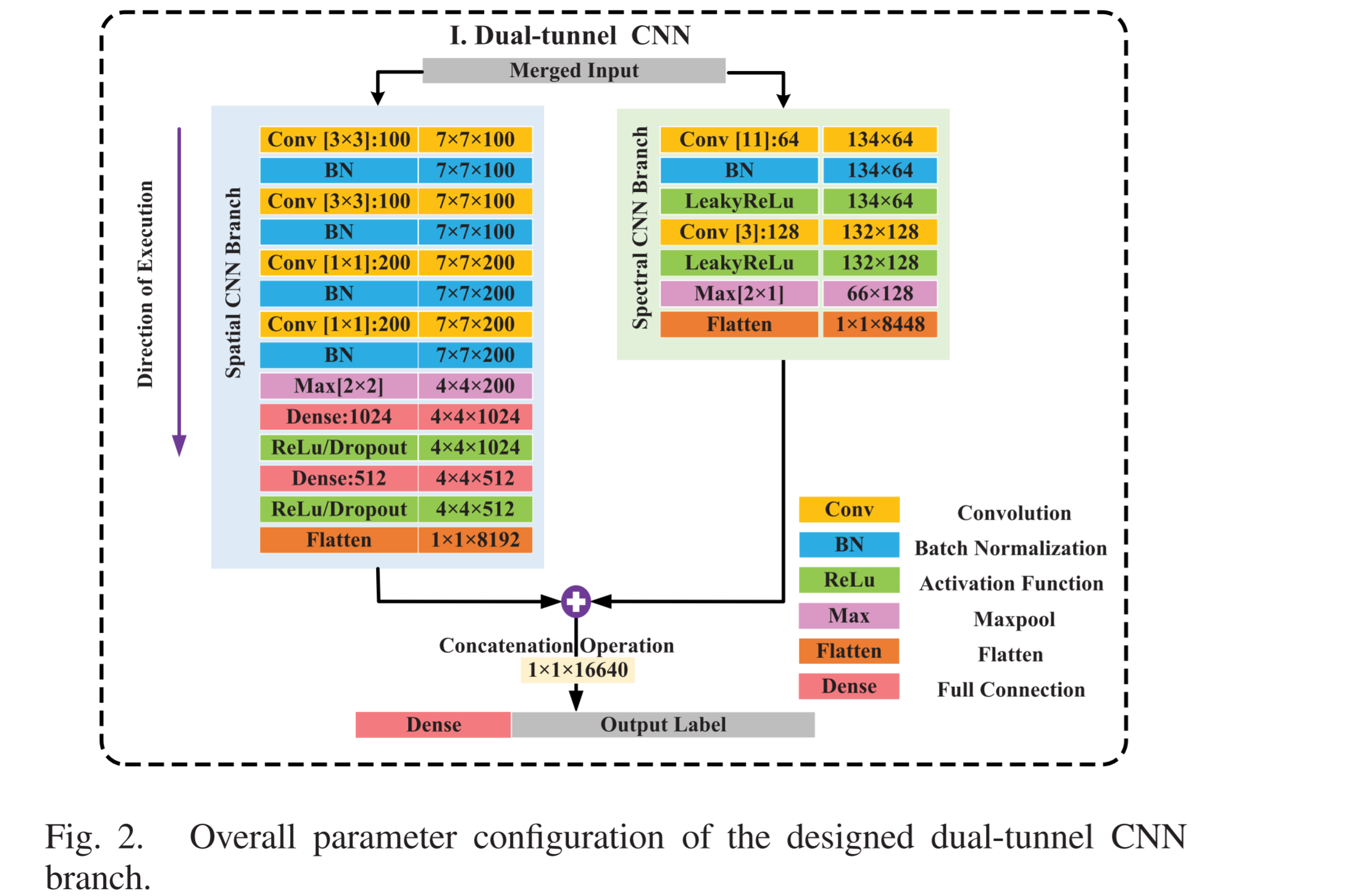
首先将HSI与LIDAR数据融合在一起,其中融合方法:颜色归一化转换、主成分光谱锐化、Gramm-Schmidt等方法。本文采用Gramm-Schmidt方法融合,然后得到融合图想H由光谱通道和空间通道组成。
将空间通道进行如图2左边所示的一系列操作,光谱通道进行右边的操作,然后使用拼接操作,送入softmax得到分布概率P:

像素层的Affinity分支——捕获具有不同高度信息的类之间的关系并确定其空间对比度
设基于LiDAR的DSM图像有N个像素,输入图像为一个带权无方向的连接图G = {V, E};Eu为N×N的稀疏矩阵,它代表每个像素与其相邻像素的欧氏距离。Eu的结果是affinity分支的输入特征。欧氏距离层用来预测像素的相似度矩阵W,权重wij∈W表示一个随机的walker穿越边eij的可能性,其表示如下:


非归一化图的拉普拉斯矩阵表示为 L:=D-W,D:the diagonal degree matrix,而归一化拉普拉斯矩阵表示为A = D^-1^ W。D、A表示如下:
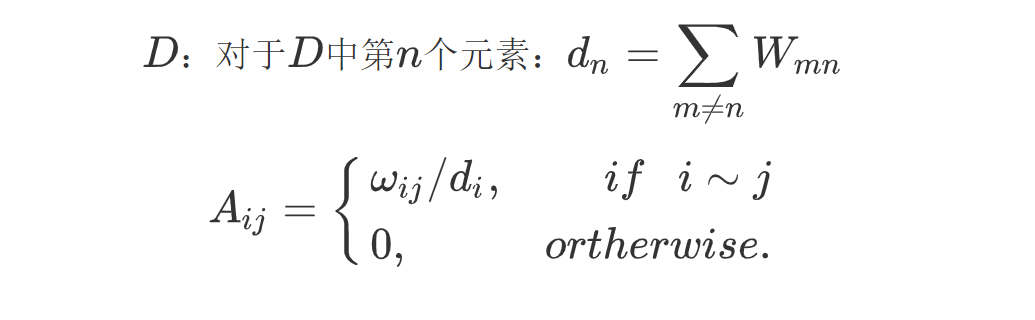
矩阵A作为随机游走网络层的一个空间约束。
随机游走网络层——合并双通道的CNN分支和像素层的Affinity分支以获得分类图
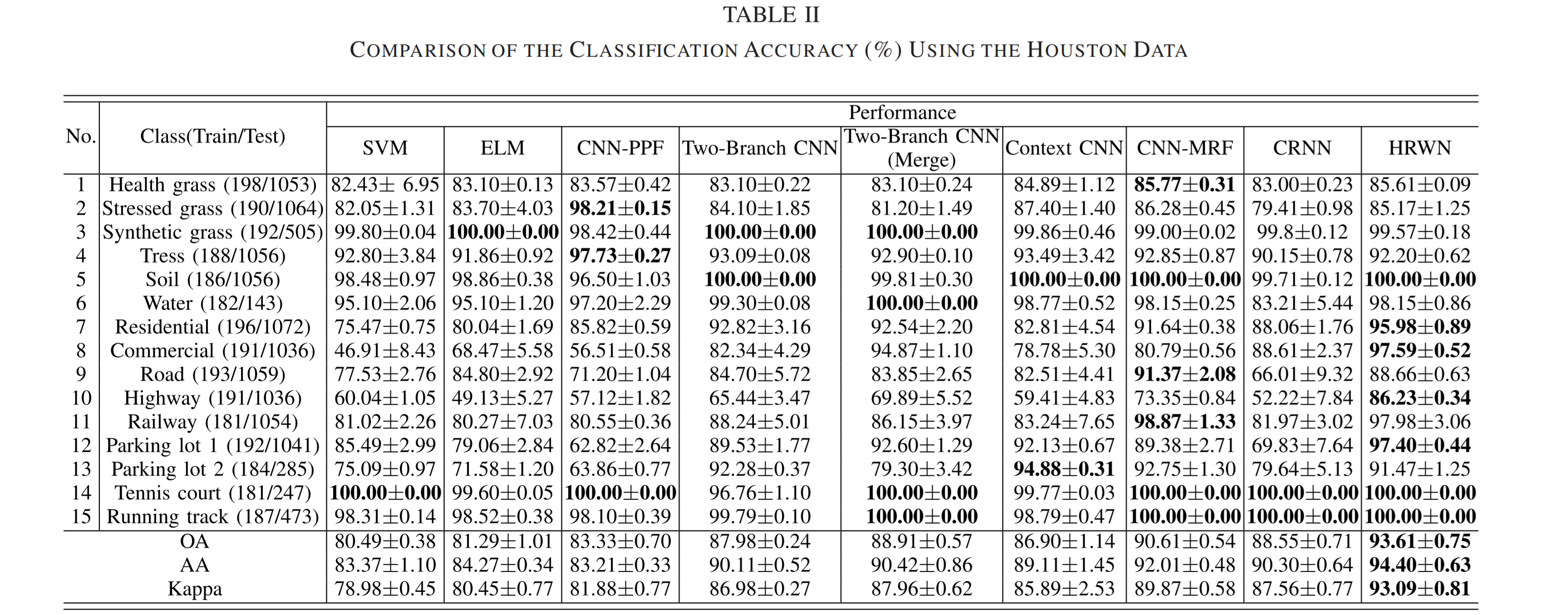
实验结果